Comanipulation for Surgical Robots
The project consists of augmenting the surgical cockpit to facilitate the execution of gestures during robotic laparoscopic surgery. This includes the design, implementation and evaluation of multimodal interaction techniques at the cross-road between HCI and Robotics. An example of this could be 1) devices which will be manipulated by both the user and a robot to increase the robustness of the interaction or 2) devices using non-standard body parts such as the head or the feet. Read more on the ISIR project website and the CAMI Labex website.
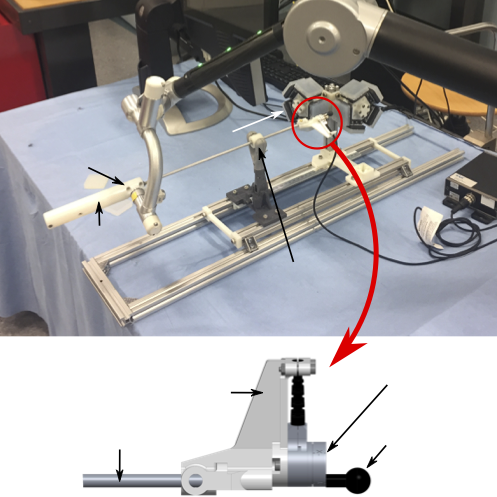
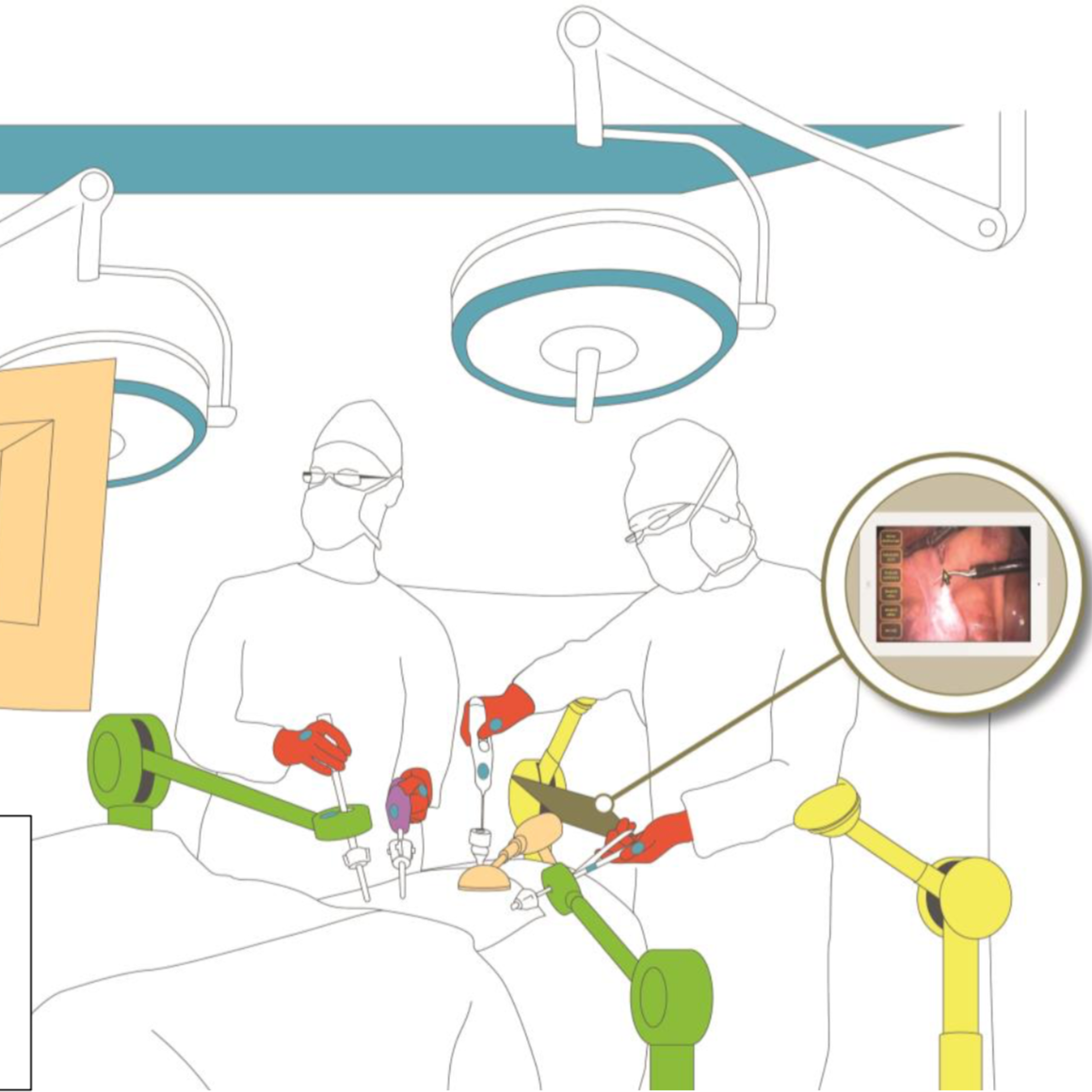
The Surgical Cockpit is a comanipulated surgical system for endoscopic surgery. Current surgical robots follow a telemanipulated paradigm, which require surgeons to sit behind a console to control the robot. This impacts the work of surgical teams in terms of communication and social interaction, as the robot withdraws the surgeon from the team; it shifts the use of perceptual senses, as haptic feedback is removed and visual contact is hindered; and, it changes the role of surgical assistants, as they now have to assist technology (robot) and not the domain expert (surgeon) (see CHI' 19 publication). The Surgical Cockpit keeps the surgeon on the operating field, next to the patient and the surgical team, mitigating these impacts. The system is composed by a robotic endoscope holder, a robotic instrument holder and a screen. The laparoscopic tools and endoscope are comanipulated by the surgeon and the system.